

Simpack マルチボディダイナミクス(機構)解析ツールの決定版

Simpackの概要
Simpackは、機構システムの運動を把握するためのマルチボディダイナミクス解析ツールです。世界有数の自動車メーカーであるダイムラー、BMWや、世界三大鉄道メーカーのシーメンス、アルストム、ボンバルディアにも採用され、その高い計算速度と精度により豊富な実績をあげています。
振り子などの自由度が小さくシンプルなシステムから、自動車全体のような多要素で複雑なシステムにいたるまで、機構システムの運動、高周波振動や非線形性の強い接触などに、精度と信頼性の高い解を提供します。
SIMULIA Simpack
マルチボディダイナミクス(機構)
解析ツール「Simpack」の特長
-
最高レベルの計算速度
-
運動方程式のリカーシブ定式化と、方程式の数を減らし、より少ない計算量を実現する相対座標系、この二つの相乗効果で業界最速の計算速度を実現します。また、マルチコア64ビットOSに対応しています。
計算速度について詳しくはこちら
-
数値積分ソルバーが実現する高精度計算
-
Simpack のために開発された優れた数値積分手法により、高周波領域でも高い計算精度を維持し、非線形性の強い問題に対して計算が発散しない高い安定性を確保します。
-
外部ツールとの連携
-
制御系設計ツールMATLAB/Simulink、リアルタイムシミュレーションHILs/SILs、複数の物理分野をまたぐマルチドメイン解析を可能にするFMI(Modelisar)と連携しています。
外部ツールとの連携について詳しくはこちら
-
最適化されたモジュール構造
-
基本モジュール(Simpack Pre/Solver/Post) をベースにして、適用分野向けのモジュール、必要な機能モジュール、外部ソフトウェアとのインターフェースを組み合わせて、特定用途向けの高度な機能と外部ツールとの連携を、高度に、柔軟に、しかも迅速に実現します。
基本モジュール(Pre/Solver/Post)
特定の用途向けモジュール
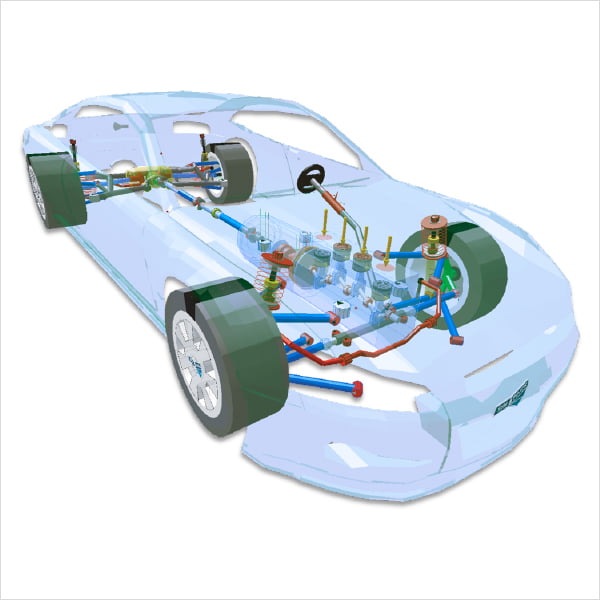
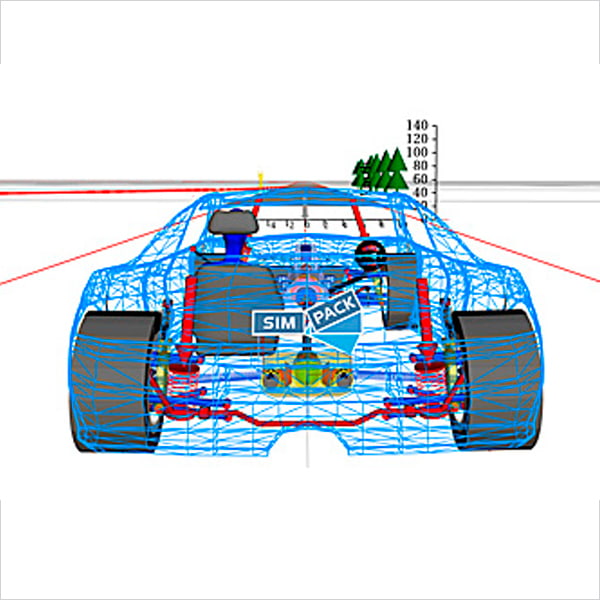
- 自動車
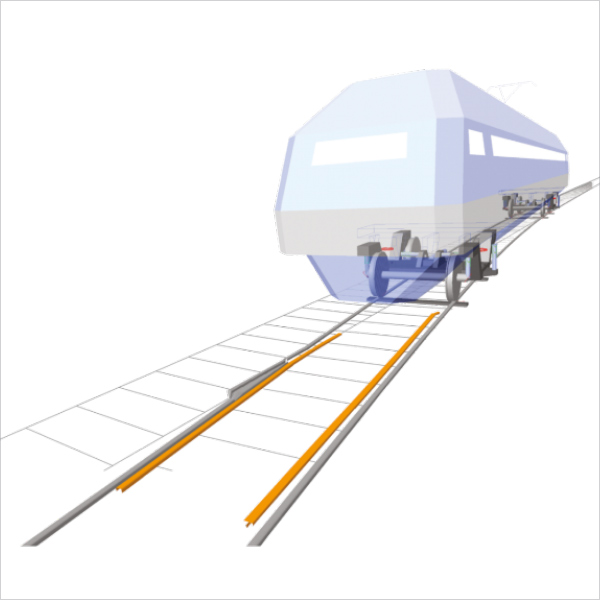
- 鉄道

- エンジンソフトウェア

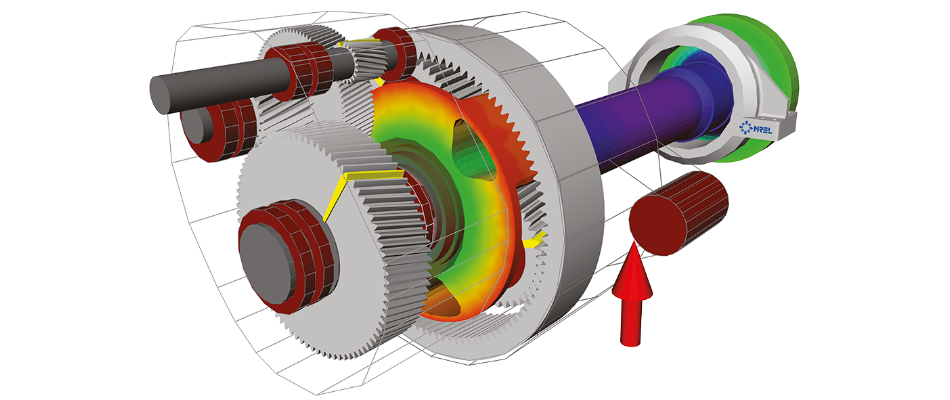
- 風力発電機ソフトウェア
- 機能別追加モジュール
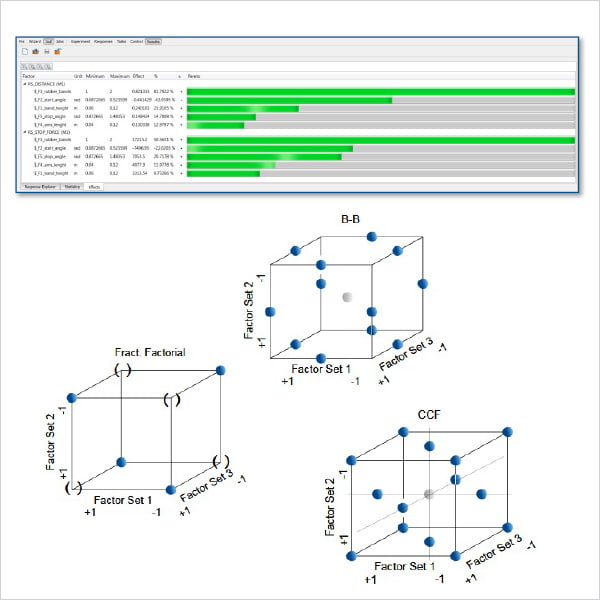
- 周波数応答、制御、パラメータスタディ、ユーザールーチン
- 要素別追加モジュール
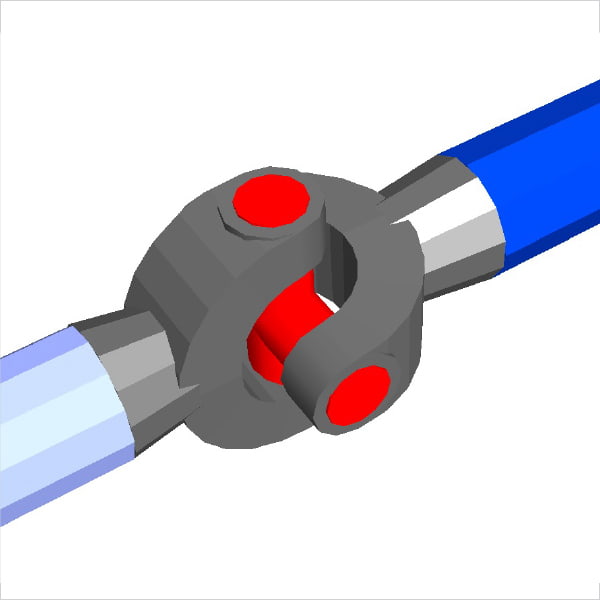
- ギヤ、チェーン、エラストマー・液封マウント、およびドライブラインの詳細モデリング要素
- 接触モジュール
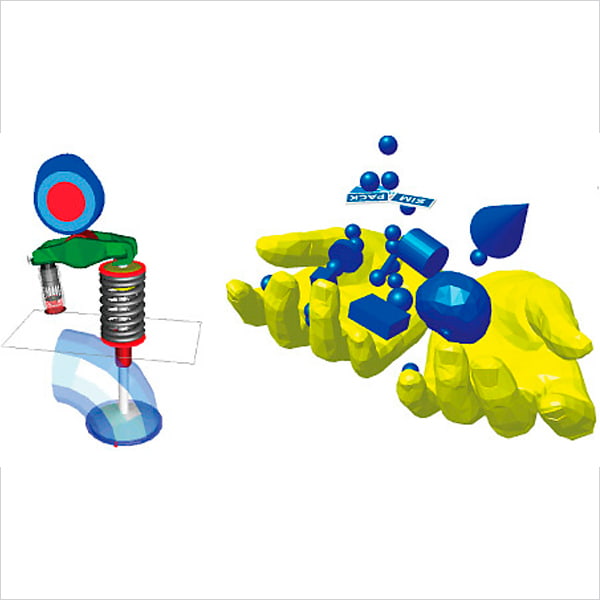
- 剛体および弾性体の2次元、3次元接触
- 弾性体モジュール
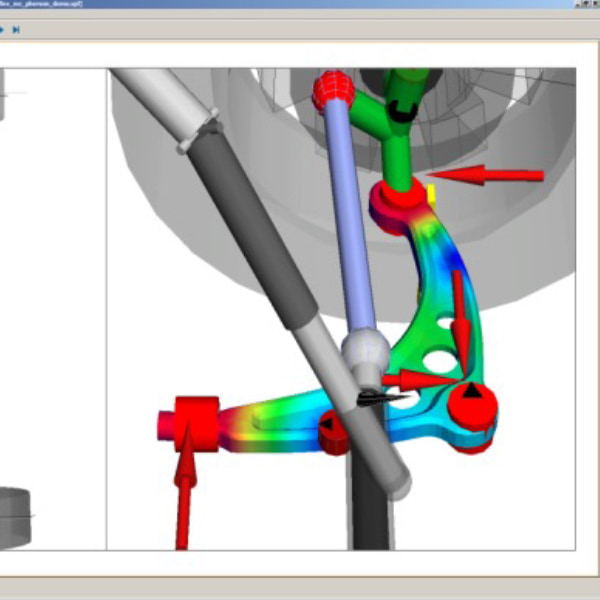
- FEMソフトからの弾性体インポート、染要素の作成、弾性体機構解析
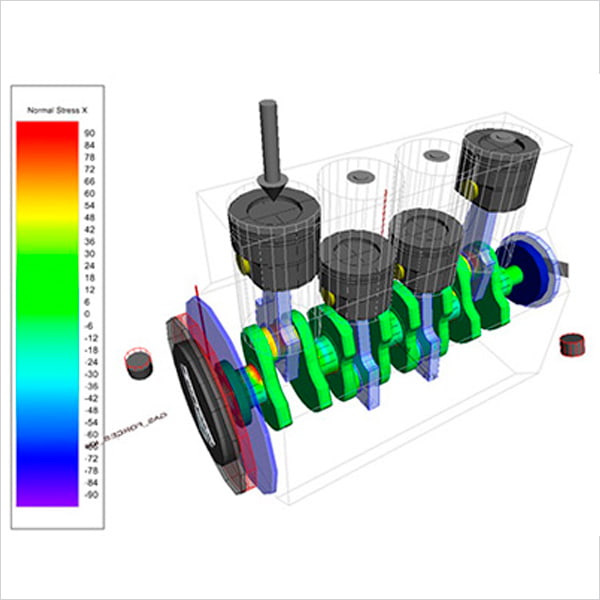
- 応力計算・疲労解析
- 静的/動的応力の評価、疲労耐久解析ソフトFEMFATへのデータ出力
- リアルタイムシミュレーション
- HILs(Hardware in the Loop)、SILs(Software in the Loop)
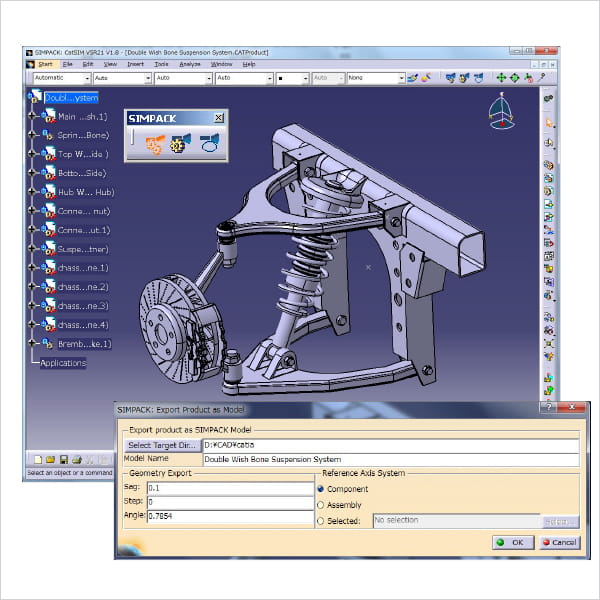
- CADインターフェース
- CATIA® V5、およびPro/ENGINEER®インターフェース
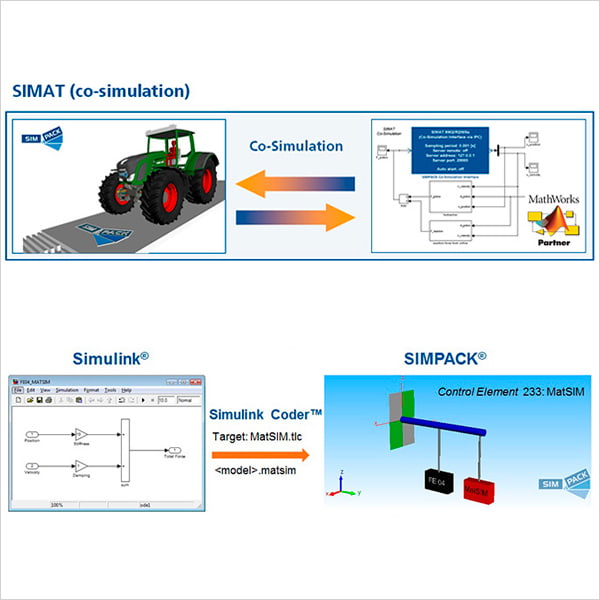
- MATLABインターフェース
- MATLAB Simulink® モデルとの相互入出力、コシミュレーション