

SIMPACK FAQ

Simpack インストール
Q1. SIMPACK のインストールに管理者権限は必要ですか?
A1. SIMPACK のインストールに管理者権限は必ずしも必要ではありませんが、管理者権限によるインストールを推奨します。
SIMPACK は Microsoft Visual Studio 2005、2008、および 2010 再頒布可能パッケージを必要とします。これらが存在しない場合、SIMPACK と一緒にインストールされます。この場合、管理者権限が必要です。
また、ライセンス管理ツール OLicense-Server のインストールには管理者権限を必要とする点にもご注意下さい。
Q2. インストーラの実行方法を教えて下さい。
A2. SIMPACK インストール DVD は、インストーラを自動実行しません。お使いの OS に応じて、以下の方法でインストーラを起動して下さい。
-
Windows の場合
フォルダを開いて “spck-9.X-buildXX-win32/64-installer.exe” をダブルクリックします。
-
Linux の場合
シェルから “spck-9.X-buildXX-linux32/64-installer.bin” を起動します。
注)
X にはバージョンおよびビルド番号が入ります。win/linux32 は 32 ビット、win/linux64 は 64 ビット環境用です。
Q3. 複数バージョンの SIMPACK を同一マシン上にインストールできますか?
A3. できます。
デフォルトのインストールディレクトリ名が SIMPACK-9.X (X はバージョン名) であるため、特別な設定は不要です。
64 ビット環境上に 32 ビット版と 64 ビット版を共存させることも可能です。
Simpack ライセンスガイド
Q4. SIMPACK に必要な OLicense-Server バージョンを教えて下さい。
A4. SIMPACK 9.0 – 9.7 に必要な OLicense-Server バージョンは以下の通りです。
最小要件: OLicense-Server 4.4.0 以上
推奨: OLicense-Server 4.4.0
OLicense-Server のバージョンは、OLicense-Server-Control のタイトルバー、または OLicense-Server ブラウザフロントエンド下部にて確認できます。
Q5. ライセンスサーバへのアクセス方法を教えて下さい。
A5. SIMPACK を利用するためには、OLicense-Server がライセンスサーバ上で稼動している状態で、サーバにアクセスする必要があります。
ライセンスサーバへのアクセス方法は以下の通りです。
1. メニューバーから “Extras” → “Licensing” を選択します。
2. “License server/file” にライセンスサーバのホスト名 (コンピュータ名または IP アドレス) と使用しているポート番号を入力します (例 hostname:8080 )。ポート番号が省略されると、デフォルトのポート番号 80 が使用されます。ホスト名とポート番号はコロン ” : ” で区切ります。
複数のサーバにアクセスする場合は、セミコロン ” ; ” で区切ります。
-
単独サーバの入力例
hostname (ポート番号は 80 を使用)
hostname:8080
-
複数サーバの入力例
hostname1;hostname2:8080;…
hostname1:80;hostname2:8080;…
注)
複数サーバで使用するサーバが増えると、パフォーマンスが低下するので注意して下さい。4 台以上のサーバの使用は控えることを推奨します。
Q6. ライセンスサーバが使用しているポート番号の確認方法を教えて下さい。
A6. ライセンスサーバ上で OLicense-Server-Control を起動します。ライセンスサーバが稼動している場合、”Start/Stop” タブの中央付近に緑色で “Server is running on port XX” (XX はポート番号) と表示されます。
OLicense-Server-Control の起動方法は以下の通りです。
-
Windows の場合
スタートメニューから “OLicenseServer” → “OLicense-Server-Control” を選択します。
-
Linux の場合
“OLicenseServerCtr” 実行ファイルを実行します。
Q7. ライセンス利用状況の確認方法を教えて下さい。
A7. License Status Enquiry 機能により、SIMPACK が認識しているライセンスキー、数量、有効期限、および現在の利用状況を確認できます。
License Status Enquiry の起動方法は以下の通りです。
1. メニューバーから “Extras” → “Licensing” を選択します。
2. “Perform License Enquiry” ボタンをクリックすると、License Status Enquiry が起動します。
Simpack プリ処理(基本操作)
Q8. 基本操作とショートカットキーを教えて下さい。
A8.
-
ビューの操作
-
Ctrl + 右マウスボタン: 平行移動
Ctrl + 左マウスボタン (またはマウスホイール): ズームイン/ズームアウト
Ctrl + 中央マウスボタン: 選択した回転中心まわりの回転
Ctrl + 中央および左マウスボタン: 面外軸まわりの回転
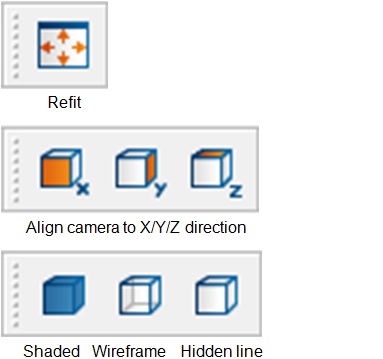
リフィット: ”Refit” アイコンをクリック (押し続けるとズームアウト)
各軸に沿って配置: ”Align camera to X/Y/Z direction” アイコンをクリック
シェーディング表示: ”Shaded” アイコンをクリック
ワイヤーフレーム表示: ”Wireframe” アイコンをクリック
陰線処理表示: ”Hidden Line” アイコンをクリック
-
ショートカットキー
Ctrl + N: 新規モデルの作成
Ctrl + O: モデルを開く
Ctrl + S: モデルの保存
Ctrl + Z: 元に戻す (Undo)
Ctrl + Y: やり直す (Redo)
Ctrl + C: コピー
Ctrl + V: 貼り付け
-
ファンクションキー
F1: マニュアルの起動
F4: 編集 (As entered) モードと確認 (Evaluated) モードの切り替え
F5: モデルの更新
F11: 全画面表示
Q9. 1 つのライセンスで複数のモデルを同時に編集できますか?
A9. できます。
1 つの SIMPACK に対して、1 つのライセンスで同時に開くことのできるモデル数に制限はありません。新たに開いたモデルは、モデルツリーに追加されます。
サブストラクチャを含むモデルで、モデルツリーからサブストラクチャを右クリックして “Open Submodel” を選択すると、サブストラクチャの元となっているモデル (サブモデル) が開きます。サブモデルの変更は、それを読み込んでいるモデル (メインモデル) にも即座に反映されます。
注)
SIMPACK を同時に複数起動すると、起動した数だけライセンスが必要になります。
Q10. サポートされている単位を教えて下さい。
A10. SIMPACK のプロパティ入力でサポートされている主な単位は以下の通りです。何も指定しない場合は、SI 単位系 (各項目の先頭) が使用されます。
長さ: m、cm、mm、um、km、in、foot、yd、mi、nmi
時間: s、ms、min、h、d
質量: kg、g、t、oz、lb、slug、tn、tnl、slinch
角度: rad、mrad、deg
電流: A、mA
電気抵抗: Ohm
インダクタンス: H、mH
電圧: V、mV、kV
磁束: Wb
面積: m2、mm2、cm2、km2
体積: m3、mm3、cm3、km3、L、galUK、galUS
速度: m/s、km/h、mph
荷重: N、kN、dyn、lbf、kip、kgf
トルク: Nm、kNm
エネルギー: J、kJ、kcal
角速度: rad/s、rpm
周波数: Hz、kHz、rad/m、1/m
仕事率: W、kW、MW
圧力: Pa、hPa、kPa、MPa、bar、psi
Q11. 複数の要素を同時に編集できますか?
A11. できます。
モデルツリー上で、Shift キーまたは Ctrl キーと左クリックによって複数の要素を同時に選択します。その後、右クリックで “Properties” を選択すると、同時編集が可能なすべてのパラメータが表示されます。
パラメータを入力して “OK” または “Apply” ボタンをクリックすると、選択した要素のパラメータが同時に変更されます。
複数要素の同時編集中は、タイトルバーに “Multiple Elements” と表示されます。複数の要素間で同じ値が入力されているパラメータにはその値が、異なる場合には空白が表示されます。
Simpack プリ処理(3Dグラフィック)
Q12. CAD グラフィックの取り込み方法を教えて下さい。
A12. SIMPACK に CAD グラフィックを取り込んで、アニメーション表示などに用いることができます。以下のファイル形式がサポートされています。
・IGES ワイヤーフレーム形式 (.igs)
・Stereolithography 形式 (.stl)
・Wavefront OBJ 形式 (.obj)
・Pro/ENGINEER および CatSIM レンダリング形式 (.slp)
・Pro/ENGINEER および CatSIM ポリゴン形式 (.ibl)
CAD グラフィックの取り込み方法は以下の通りです。
1. モデルツリーの “Globals” → “Search Path” をダブルクリックします。
2. ” + ” ボタンをクリックして CAD ファイルが保存されているディレクトリを選択し、”OK” ボタンをクリックします。
3. CAD グラフィックを割り当てたいボディに対して、プリミティブ (ジオメトリ) を作成します。
4. プリミティブタイプを “39: CAD Interface” に設定します。
5. “2: CAD file name” の横にある ” … ” ボタンをクリックし、CAD ファイルを選択します。
6. 必要に応じて、スケーリングやミラーリングに関するパラメータを入力します。
注)
CatSIM は、CATIA V5 から SIMPACK 用のボディデータ (CAD グラフィック、慣性情報、および接触形状) を出力するためのオプションモジュールです。CatSIM の利用には専用ライセンスが必要です。
Q13. 調整したカメラ視点を保存できますか?
A13. できます。
Ctrl キー + マウスボタンなどによって調整したカメラ視点は、ビューと呼ばれる要素に保存できます。
複数のビューを作成し、各ビューを切り替えることが可能です。ビューの数に制限はありません。作成したビューは、Post でも利用できます。
ビューの作成、保存、および切り替え方法は以下の通りです。
1. 3D ページ上で右クリックし、”Create” → “View” を選択します。
2. ビューの名称を入力し、”OK” ボタンをクリックします。
3. モデルツリー上で作成したビューを右クリックし、”Overwrite with working View” を選択します。
4. ビューの切り替えは、モデルツリー上で表示したいビューをダブルクリックして行います。
注)
作成したビューとは別に、現在のカメラ視点がワーキングビューとして保存されます。
Q14. モデルに追従する移動カメラを設定できますか?
A14. できます。
モデル上の特定の位置に追従する移動カメラを設定できます。長距離を移動する物体 (車両など) のアニメーションに便利です。設定した移動カメラは、Post でも有効です。
移動カメラの設定方法は以下の通りです。
1. 3D ページ上で右クリックし、”View Properties” を選択します。
2. “Advanced” タブを選択します。
3. “Moved Camera” にチェックを入れます。
4. “Marker” の横にある ” … ” ボタンをクリックし、カメラを追従させたいマーカーを選択します。
5. カメラを追従させたい方向にチェックを入れます。
Simpack プリ処理(2Dブロック図)
Q15. 要素線を任意の位置で折ることはできますか?
A15. できます。
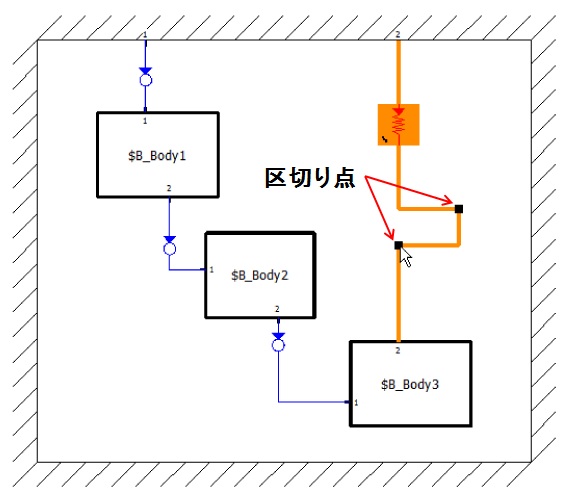
ボディ同士を結合する要素線 (ジョイント、拘束、フォース要素) は、区切り点 (break point) を追加して任意の位置で折ることができます。複雑なモデルの 2D ブロック図を見やすくレイアウトするのに便利です。
区切り点を作成するには、要素線上の線を折りたい位置で ダブルクリック します。区切り点を削除するには、区切り点上を ダブルクリック します。
Q16. ブロック図の構成要素を整列させて見やすくしたいのですが…
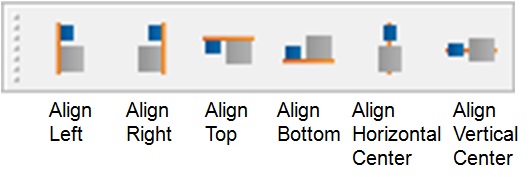
A16. ブロック図の構成要素を整列させるためのアイコンが用意されています。利用可能なアイコンは以下の通りです。
Align Left: 左に揃える
Align Right: 右に揃える
Align Top: 上に揃える
Align Bottom: 下に揃える
Align Horizontal Center: 左右中央に揃える
Align Vertical Center: 上下中央に揃える
整列させたい要素名が明確な場合は、モデルツリー上で要素を複数同時に選択 (Shift キーまたは Ctrl キーと左クリック) して整列アイコンをクリックする方法が効率的です。
Q17. 上位モデルとサブストラクチャ間の移動方法を教えて下さい。
A17.
-
上位モデルからサブストラクチャへの移動
グレーのサブストラクチャブロックをダブルクリックします。
-
サブストラクチャから上位モデルへの移動
2D ページ上で右クリックし、”Display Parent in Blockdiagram” を選択します。
Q18.要素線を非表示にできますか?
A18. できます。
ボディ同士を結合する要素線 (ジョイント、拘束、フォース要素) は、以下の方法で非表示にできます。
1. 2D ページ上で右クリックし、”2D Properties” を選択します。
2. “Visibility” 欄で非表示にしたい要素のチェックを外します。
これは、サブストラクチャを含むモデルで、サブストラクチャ間を結合する要素線が多くて見づらい場合などに有効です。
Q19. ボディの枠が小さ過ぎて名称が見えません。
A19. ボディの枠の大きさは、デフォルトではかなり小さめに設定されています。そのため、長いボディ名は表示されず、見つけるのが困難です。
枠の大きさを 1 つずつ調整するのは手間がかかるため、以下の方法を推奨します。
1. モデルツリー上で、同程度の長さの名称をもつボディを複数同時に選択します (Shift キーまたは Ctrl キーと左クリック)。
2. 2D ページ上でハイライトされたボディ上の黒点をマウスでドラッグし、ボディ名が表示されるまで枠を拡大します。
3. すべてのボディ名が見えるようになるまで、手順 1 ~ 2 を繰り返します。
Simpack プリ処理(応用機能)
Q20. 要素を削除せず、無効化できますか?
A20. できます。
無効化したい要素をモデルツリー上で右クリックし、”Disable” を選択して下さい。無効化された要素は、モデルツリー上でグレーに塗られます。2D ページ上では、要素線が点線になります。
再び有効化する場合は、同様の操作で “Enable” を選択して下さい。
有効/無効化は、主に拘束、フォース要素、およびコントロール要素に対して用いられます。解析条件や必要精度に応じて要素を切り替えたい場合などに便利です。
Q21. SubVar をカテゴリー別に分類して整理したいのですが…
A21. SubVar Group による SubVar のグループ化が便利です。
マーカー座標、慣性情報、フォース要素パラメータなど、カテゴリーごとに SubVar Group を作成して分類すると、SubVar の管理および検索が楽になります。
SubVar Group は、モデルツリーまたは SubVars 領域上でSubVars または他の SubVar Group を右クリックし、 “Create SubVar Group” を選択して作成します。
SubVar を SubVar Group に格納する場合は、SubVar Group 上にマウスでドラッグします。
SubVar Group は、SubVar だけでなく、他の SubVar Group を含むことができます。これによって、SubVar を任意の階層レベルで整理できます。
Q22. プロパティ入力画面で SubVar や数式の値を確認したいのですが…
A22. F4 キーによる編集モードと確認モードの切り替えが便利です。
要素プロパティの入力に SubVar や数式を使用すると、テキストボックス上に値が直接表示されません。マウスカーソルを当てると、ツールチップが表示されて値を確認できますが、入力項目が多い場合は時間がかかります。
このような場合は、F4 キーを押して確認 (Evaluated) モードに切り替えると、すべての SubVar および数式が値で表示されるようになります。単位をともなう値の場合は、SI 単位系で表示されます。
再度 F4 キーを押すと、SubVar や数式のまま表示する編集 (As entered) モードに戻ります。
デフォルト設定は編集モードですが、メニューバーから “Extras” → “Options” を選択し、”General” タブの “Display Data” を “Evaluated” にすると確認モードに変更できます。
Q23. モデルデータを一覧表示させたいのですが…
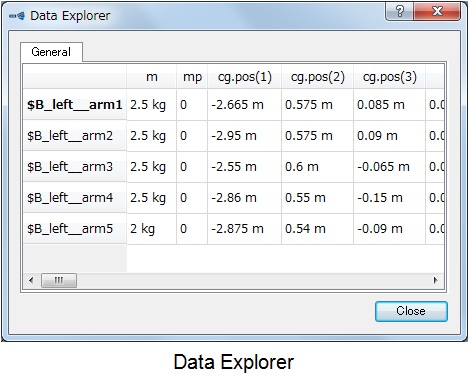
A23. Data Explorer により実現できます。
Data Explorer は、選択した要素の入力データを一覧表示します。項目別ソート、キーワード検索、CSV 出力、クリップボードへのコピー (Excel に貼り付け可) などの機能があります。
Data Explorer を起動するには、モデルツリー上で一覧表示させたい要素を複数同時に選択 (Shift キーまたは Ctrl キーと左クリック) して “Data Explorer” を選択します。
Data Explorer は、F4 キーによる編集モードと確認モードの切り替えにも対応しています。
Simpack プリ処理(データベース)
Q24. データベースの基本構造を教えて下さい。
A24. データベース構造の最上層にあり、検索パス (Search Path) によって指定されるディレクトリのことをルートディレクトリと呼びます。
以下の 2 通りの構造で、データベースを構築できます。
-
ルートディレクトリの直下にファイルを置く方法
すべてのデータベースファイルを、ルートディレクトリの直下に置きます。
-
固定名のサブディレクトリを用いる方法 (8.9 互換形式)
-
ルートディレクトリの下に、データベースファイルの種類に応じた固定名のサブディレクトリを作成し、その下にファイルを置きます。主なサブディレクトリ名と対応するファイルの種類は以下の通りです。
cad_geometry: CAD 形状 (.igs、.stl、.obj、.slp、.ibl)
elastic_body: 弾性体 (.fbi、.sid_fem)
input_functions: Input Function (.if2)
mbs_db_cdtire: CDTire 入力データ
mbs_db_csv: CSV ファイル (.csv)
mbs_db_extfile: 外部ファイル (cosin FTire や IST TOWER の入力データなど)
mbs_db_fmu: FMU (Functional Mock-up Unit)
mbs_db_ip: SubVar (.subvar、.sys)
mbs_db_matsim: MatSIM ファイル (.dll)
mbs_db_road: 路面定義ファイル (.rdf)
mbs_db_substructure: サブストラクチャ (.spck)
par_array: Input Function (.afs)
surface_2d: 2D 接触ライン (.su2)
surface_3d: 3D 接触面 (.su3)
track_cartographic: Cartographic トラック (.trc)
track_excitated: 軌道不整/路面不整 (.tre)
track_measured: Measured トラック (.trm)
tyre: タイヤ入力データ
→ delft_swift: MF-Tyre、MF-Swift
→ hsri: HSRI
→ pacejka_magic_formula: Pacejka Magic Formula
→ pacejka_similarity: Pacejka Similarity
→ sti: STI (Standard Tyre Interface)
→ tmeasy: TMeasy
→ user: SIMPACK User Tyre (ユーザールーチン)
wheel_rail_profiles: 車輪断面 (.prw)、レール断面 (.prr)
Q25. 検索パスの設定方法を教えて下さい。
A25. データベースには、以下の 3 通りがあります。
・デフォルト: インストール時の自動設定で、すべてのモデルに適用
・ユーザー固有: 設定したユーザーのすべてのモデルに適用
・モデル固有: 設定したモデルにのみ適用
それぞれの検索パスの設定方法は、以下の通りです。
-
ユーザー固有データベース
-
1. メニューバーから “Extras” → “Options” を選択します。
2. “Search Path” タブの “User Specific Search Path” 欄で ” + ” ボタンをクリックして、ファイルブラウザを開きます。
3. ユーザー固有データベースのルートディレクトリを選択し、”フォルダーの選択” ボタンをクリックしてファイルブラウザを閉じます。
4. “OK” ボタンをクリックします。
-
モデル固有データベース
-
1. モデルツリーから “Globals” → “Search Path” をダブルクリックし、”Search Path List” を開きます。
2. ” + ” ボタンをクリックして、ファイルブラウザを開きます。
3. モデル固有データベースのルートディレクトリを選択し、”フォルダーの選択” ボタンをクリックしてファイルブラウザを閉じます。
4. “OK” ボタンをクリックします。
Q26. データベースファイルを含めたモデルのアーカイブを作成できますか?
A26. できます。
モデルが参照しているすべてのデータベース検索パスから、使用しているファイルのみを抽出してスタンドアロンモデルとして 1 箇所にまとめることができます。モデルを第三者に渡す場合などに便利です。
手順は以下の通りです。
1. メニューバーから “File” → “Create Standalone Model” を選択します。
2. “Create” 欄で、”Directory with Standalone Model” (非圧縮) または “ZIP-File with Standalone Model” (圧縮)を選択します。
3. 計算結果を含める場合は、”Result File Handling” 欄の “Include Results” にチェックを入れます。
4. “OK” ボタンをクリックすると、モデルと同階層にスタンドアロンモデルを含むディレクトリ、または ZIP 形式圧縮ファイルが作成されます。デフォルトの名称は、”YYYY-MM-DD_HHMM_モデル名” です。
注)
YYYY-MM-DD_HHMM は、スタンドアロンモデル作成時の年月日と時刻です。
Simpack ソルバー
Q27. マルチコア並列計算の設定方法を教えて下さい。
A27. モデルごとに、Solver Settings で設定します。
手順は以下の通りです。
1. モデルツリー上で “Solver Settings” を開き、現在アクティブなソルバー設定をダブルクリックします。
2. ソルバー設定ダイアログの左の項目から、”Parallel Solver” を選択します。
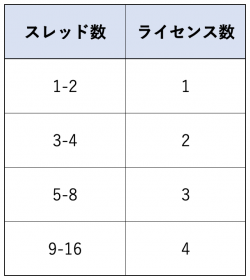
3. “Number of Threads” に、並列計算のスレッド数を入力します。
並列計算には、スレッド数に応じたソルバーライセンスが必要です。スレッド数と必要ライセンス数の関係は右表の通りです。
Q28. 1つのモデルに複数のソルバー設定を保存できますか?
A28. できます。
ソルバー設定は、”Solver Settings” に保存されます。任意の数のソルバー設定を作成できます。計算には、アクティブなソルバー設定が使用されます。
ソルバー設定を新規作成する場合は、3D ページ上で右クリックし、”Create” → “Solver Settings” を選択します。
ソルバー設定をアクティブにしたい場合は、モデルツリー上でソルバー設定を右クリックし、”Activate Solver Settings” を選択します。非アクティブなソルバー設定は、アイコンがグレーで表示されます。
Q29. オフライン時間積分の実行中に結果を確認できますか?
A29. できます。
計算に時間のかかる大規模モデルの場合や、途中で急に計算速度が遅くなり脱線や横転などの発生が疑われる場合など、計算を中止せずに結果を確認できます。.sir と、.sbr の 2 通りのファイル形式による方法があります。
-
.sir ファイルによる状態量と積分器情報の確認
SIMPACK Intermediate Result (.sir) ファイルには、ジョイントやフォース要素などの各種状態量と時間刻みなどの積分器情報が含まれます。.sir ファイルは、オフライン時間積分の実行中に随時更新されます。そのため、計算中に Post に読み込んで結果をプロットできます。
-
.sbr によるアニメーションとすべての解析結果の確認 (追加ライセンスが必要)
SIMPACK Binary Result (.sbr) ファイルには、アニメーションとソルバー設定で指定したすべての解析結果が含まれます。.sbr ファイルは、メジャメントによって出力されます。計算途中に “Perform Measurements” アイコンをクリックして、それまでの結果を出力できます。出力された結果は、Post に読み込んでアニメーションおよびプロットで確認できます。この方法には、追加のソルバーライセンスが必要です。
Q30. 推奨の時間積分手法を教えて下さい。
A30. SIMPACK には、大きく分けて 7 種類の時間積分手法があり、設定でさらに細かく分類できます。
ほとんどの場合、デフォルトの “SODASRT 2″ が推奨です。リアルタイムシミュレーションの場合、”Fixed stepsize” を用います。
各手法の概要は以下の通りです。
-
SODASRT 2 (推奨)
陰的多段の後退差分公式 (BDF) を用いた、スティフ問題用の DAE 積分器です。DASRT をベースに、様々な SIMPACK 独自の改良が施されています。高速、高精度、高安定性を有し、ほとんどの用途に適した SIMPACK のデフォルト積分器です。
-
LSODE
ODE 積分器で、設定によって非スティフ問題用の “Adams-Bashford-Moulton” とスティフ問題用の “Gear” を選択できます。
-
Fixed stepsize (リアルタイム用)
SIMPACK の固定時間刻み積分器群の総称で、設定によって陽的オイラー法や古典的ルンゲ・クッタ法をはじめとする様々な積分器を選択できます。ODE 積分器が主流ですが、DAE 積分器もあります。それぞれの積分器は、手法を選択することでさらに細かく分類できます。固定時間刻み積分器は、主にリアルタイムシミュレーションに用います。
-
DOPRI5
Dormand-Prince による 5 次の陽的ルンゲ・クッタ法を用いた、非スティフ問題用の ODE 積分器です。解析精度が高いため、主に他の積分器との比較検証に用いられます。
-
RADAU5
5 次の陰的ルンゲ・クッタ法を用いた、スティフ問題用の DAE 積分器です。解析精度が高いため、主に他の積分器との比較検証に用いられます。
-
SODASRT
SIMPACK 8.8 までのデフォルト積分器で、SODASRT 2 の前身にあたります。基本的な特長は SODASRT 2 と同じですが、SODASRT 2 には SIMPACK に特化した改良が加えられています。
-
SOBDF2
SODASRT 2 から派生した積分器で、基本的な特長は SODASRT 2 と同じですが、次数を 2 に固定することで高周波振動に数値減衰を与えます。さらに、SIMPACK 積分器で唯一、最小時間刻みを設定できます。モデルが、計算結果に大きな影響の無い不連続性や高周波振動を含んでいる場合に、計算を高速化できる可能性があります。
注)
ODE は Ordinary Differential Equation (常微分方程式) の略で、DAE は Differential Algebraic Equation (微分代数方程式)の略です。ODE 積分器は、拘束要素や代数状態量を扱えないのでご注意下さい。
Q31. 時間積分のソルバー設定 Output steps は解析精度に影響ありますか?
A31. ありません。
“Output steps” は、解析結果の出力時間刻みのための設定であり、解析精度に影響のある積分器の時間刻みではありません。
SIMPACK のデフォルト積分器 SODASRT 2 をはじめとして、ほとんどの積分器は可変時間刻みであり、その時間刻みは許容誤差 (tolerance) によって決まります。
一方、固定時間刻みの積分器 Fixed stepsize の場合は、”Stepsize” で時間刻みを設定します。
Q32. 時間積分の推奨の許容誤差 (tolerance) 設定を教えて下さい。
A32. 許容誤差が大き過ぎると解析精度が低下し、小さ過ぎると計算時間が増大します。そのため、解析の目的やモデルに応じて、適切な値を設定する必要があります。
典型的なモデルに対する SIMPACK の推奨許容誤差は、以下の通りです。
-
自動車
General – abosolute: 1e-5
General – relative: 1e-4
-
鉄道車両
General – abosolute: 1e-5
General – relative: 1e-10
Velocity states – abosolute: 1e-4
Velocity states – relative: 1e-4
-
一般
General – abosolute: 1e-5
General – relative: 1e-7
Velocity states – abosolute: 1e-4
Velocity states – relative: 1e-5
新規モデル作成でテンプレートを選択した場合は、選択に応じて上記の値がデフォルトとなります。
許容誤差を推奨値より大きくすることは、計算精度の観点から推奨できません。一方、計算の目的によっては許容誤差を小さくすることがあります。その場合、計算時間と計算精度を十分に検証したうえで設定して下さい。
Q33. 絶対許容誤差と相対許容誤差の違いを教えて下さい。
A33. 許容誤差の一般的な定義は、過去の値から計算された現在の予測値と、これをもとに計算された現在の値の差です。
絶対許容誤差 (abosolute tolerance = ATOL) は、予測値 (x_pre) と現在値 (x_ret) の差です。実際に必要とされる計算精度より 1 桁小さくすることが推奨されます。
ATOL = x_pre – x_ret
相対許容誤差 (relative tolerance = RTOL) は、予測値と現在値の差の、予測値に対する割合です。
RTOL = (x_pre – x_ret) / x_pre
SODASRT 2 をはじめとする可変時間刻みの積分器では、以下の式を満たすまで時間刻みを細かくして計算を繰り返してから、次の時間ステップに進みます。
x_pre – x_ret ≤ ATOL + RTOL * x_pre
上の式からわかるように、変位の小さな状態量に関しては絶対許容誤差 (ATOL) が支配的であり、変位が大きな状態量 (クランクシャフトの回転角や鉄道車両の走行距離など) に関しては相対許容誤差が支配的となります。そのため、相対許容誤差を大きくし過ぎると、変位が大きくなった際に解析精度が悪化します。
Q34. 積分器 SODASRT 2 の主な設定項目を教えて下さい。
A34.デフォルト積分器 SODASRT 2 の主な設定項目は、以下の通りです。
-
Tolerances タブ
-
許容誤差を設定します。許容誤差が大き過ぎると解析精度が低下し、小さ過ぎると計算時間が増大します。そのため、解析の目的やモデルに応じて、適切な値を設定する必要があります。適切な値がわからない場合、以下の一般モデルに対する推奨設定をお試し下さい。
General – abosolute: 1e-5
General – relative: 1e-7
Velocity states – abosolute: 1e-4
Velocity states – relative: 1e-5
-
General タブ
-
nitial stepsize:
初期時間刻みです。ほとんどの場合、”0 (自動)” で構いません。Maximum stepsize:
最大時間刻みです。通常は “0 (制限なし)” で構いません。計算中に時間刻みが大きくなり過ぎて、路面や軌道の凹凸を検知できないおそれがある場合は、”0.1s” 程度の値を設定します。Maximum order:
最大積分次数です。SODASRT 2 は、1 ~ 最大次数の間で次数を自動調整します。ほとんどの場合において、デフォルトの “5” を推奨します。不連続性の強い事象に対して積分器の安定性を高めたい場合や、数値減衰を導入して計算速度を向上させたい場合は、”2″ 程度の小さな値に設定します。Maximum number of RHS evaluations:
RHS (Right-Hand Side = 運動方程式の右辺の計算) の最大回数です。計算開始からの RHS の合計回数がこの値を超えると、計算を強制終了します。ほとんどの場合、”-1 (制限なし)” で構いません。MBS Formalism:
運動方程式の形式を選択します。デフォルトは “Explicit” ですが、モデルによっては “Residual” の方が計算時間を短縮できます。よく使用するモデルで比較し、計算時間が短い方を選択して下さい。Explicit: 運動方程式の右辺に質量行列の逆行列を含みます。
Residual: 運動方程式の右辺に質量行列の逆行列を含みません。Root Functions:
接触や摩擦等の不連続性の強いフォース要素に対して、時間刻みを自動的に調整して高精度な解を得るための手法です。”Enable state event detection” にチェックを入れると、Root Function が有効になります (推奨)。計算中に Root Function が使用されたかどうかは、メッセージログで確認できます。計算時間が増大する場合は、結果に大きな差が無ければ無効にしても構いません。
Simpack ポスト処理(基本操作)
Q35. 基本操作とショートカットキーを教えて下さい。
A35.
-
アニメーションの操作
-
Ctrl + 右マウスボタン: 平行移動
Ctrl + 左マウスボタン (またはマウスホイール): ズームイン/ズームアウト
Ctrl + 中央マウスボタン: 選択した回転中心まわりの回転
Ctrl + 中央および左マウスボタン: 面外軸まわりの回転リフィット: ”Refit” アイコンをクリック
各軸に沿って配置: 右クリックして “Camera Views”
→ “X Y Z”、”Y -X Z”、”-X Z Y”、”Y Z X” を選択シェーディング表示: 右クリックして “Draw Style” → “Solid” を選択
ワイヤーフレーム表示: 〃 → “Wireframe” を選択
陰線処理表示: 〃 → “Hidden Line” を選択
-
プロットの操作
Ctrl + 右マウスボタン: 平行移動
Ctrl + 左マウスボタン (またはマウスホイール): ズームイン/ズームアウト
Ctrl + 中央マウスボタン (または”Refit” アイコンをクリック): リフィット
Ctrl + Shift + 左マウスボタン: ボックスズーム (Ctrl + 左マウスボタン で元に戻す)
-
ショートカットキー
Ctrl + N: 新規プロジェクトの作成
Ctrl + O: プロジェクトを開く
Ctrl + S: プロジェクトの保存
Ctrl + Z: 元に戻す (Undo)
Ctrl + Y: やり直す (Redo)
Ctrl + X: 切り取り
Ctrl + C: コピー
Ctrl + V: 貼り付け
-
ファンクションキー
F1: マニュアルの起動
F5: スクリプトコードの更新
F6: ビュー (セッションツリーやリザルトツリー) の非表示
F11: 全画面表示
Q36. 読み込むことのできるファイル形式を教えて下さい。
A36. Post に読み込むことのできる主なファイル形式は、以下の通りです。
SIMPACK Project (.spf): レイアウト情報および結果ファイルへのリンクが記述された XML 形式ファイル
SIMPACK Binary Result (.sbr): メジャメントによって出力されるバイナリ結果ファイル
ASCII Result (.csv): 任意の文字で区切られた ASCII データ
ASCII Result (.*): 任意の文字で区切られた ASCII データ
Stress Curve (.srf): 弾性体の応力
Deformation Curve (.drf): 弾性体の変形量
Eigen Value Result (.eva): 固有値解析結果
Input Function Set (.if2、.afs): Input Function 入力ファイル
SIMPACK Intermediate Results (.sir): オフライン時間積分によって出力される各種状態量と積分器情報
2D Surface (.su2): 2D 接触ライン入力ファイル
Rail-Wheel Profile (.prr、.prw、.rp、.wp): 車輪断面、レール断面入力ファイル
Track or Road Excitation (.tre): 軌道不整、路面不整入力ファイル
Measured Track (.trm): Measured トラック入力ファイル
ファイルの読み込みは、”Open” アイコンをクリックして、またはリザルトツリーの “Files” を右クリック → “Open” から行います。ただし、.spf ファイルのみ、リザルトツリーからは読み込めませんのでご注意下さい。

Q37. リザルトツリーが表示されません。
A37. インストール後の初回起動時は、リザルトツリーが非表示になっています。
メニューバーから “Window” → “Views” → “Result Tree” を選択して表示して下さい。表示設定は、Post 終了後も記憶されます。
Simpack ポスト処理(アニメーション)
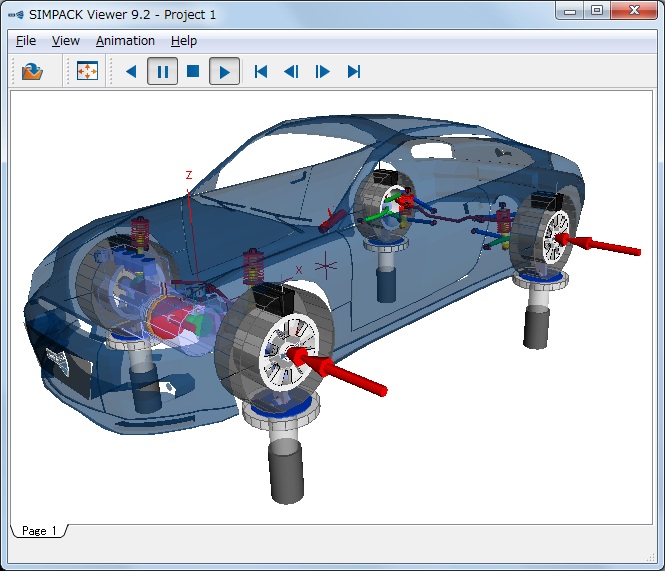
Q38.ライセンス不要のビューワはありますか?
A38. SIMPACK Viewer は、ライセンス不要のアニメーションビューワです。.sbr ファイルにもとづく高画質のアニメーション再生に加え、ズームや回転などの視点変更も可能です。
SIMPACK Viewr の主な機能は以下の通りです。
・.sbr ファイルの読み込み
・視点の変更 (平行移動、ズーム、回転など)
・移動カメラの設定
・アニメーションの再生
・MPEG 動画ファイルの出力
SIMPACK Viewer のインストーラは、SIMPACK インストール DVD に含まれています。
Windows: spckviewer-9.X-buildXX-win32/64-installer.exe
Linux: spckviewer-9.X-buildXX-linux32/64-installer.bin
SIMPACK Viewer 用に .sbr のファイル容量を小さくしたい場合は、Pre のソルバー設定の “Measurements” → “Result Configuration” タブで不要な結果タイプのチェックを外し、メジャメントを再実行して下さい。
注)
X にはバージョンおよびビルド番号が入ります。win/linux32 は 32 ビット、win/linux64 は 64 ビット環境用です。
Q39. 動画ファイルを出力できますか?
A39. MPEG 形式の動画ファイルを出力できます。
手順は以下の通りです。
1. メニューバーから “Animation” → “Open Animation Player” を選択して、アニメーションプレイヤーを開きます。
2. “MPEG Export” タブの “Export” 欄で、出力タイプを選択します。
Page: ページ全体を出力
Animation Frame: アニメーションフレームのみを出力
3. “Player” タブで、”Enable MPEG Export” ボタンをクリックします。ボタンの色が変わります。
4. “Browse” ボタンをクリックしてファイルブラウザを開き、ファイル名と出力ディレクトリを指定します。
5. 必要に応じて、開始時間、終了時間、再生速度などを調整します。
6. アニメーションを再生します。再生が終わると、
” The animation has stopped.Do you like also to stop the mpeg export? “
というメッセージが表示されます。
7. “Stop Export” ボタンをクリックすると、MPEG ファイルが出力されます。

Q40. Pre で作成したビューを Post で利用できますか?
A40. できます。
アニメーションフレームを右クリックして “Camera Views” を選択すると、モデルに設定されたすべてのビュー (サブストラクチャを含む) が表示されます。設定したいビューを選択して下さい。
Pre で作成したビューは、視点だけでなく移動カメラの設定なども Post に引き継がれます。
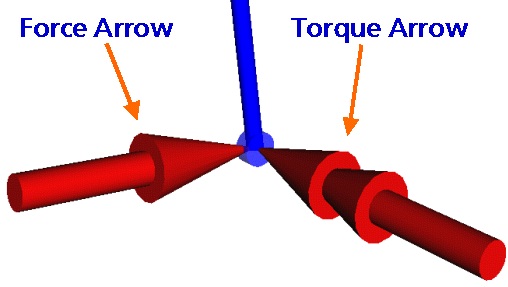
Q41. 荷重やトルクを矢印で表現したいのですが…
A41. フォース要素およびジョイントの荷重やトルクの大きさを、矢印のアニメーションで表現できます。
方法は以下の通りです。
-
フォース要素① (方向ごとの荷重/トルク、および合力)
リザルトツリーの “force force” または “force torque” からフォース要素を展開し、”x、y、z” のいずれかをアニメーションフレームにドラッグすると、From ボディの BRF 基準での各方向の荷重/トルクが矢印で表示されます。フォース要素そのものをドラッグすると、合力が表示されます。
-
フォース要素② (タイプ固有の出力)
-
フォース要素の中には、タイプ固有の出力をアニメーション表示できるものもあります。リザルトツリーの “force output” からフォース要素を展開し、矢印表示する出力をアニメーションフレームにドラッグして下さい。フォース要素そのものをドラッグすると、表示可能なすべての出力が表示されます。本機能に対応する主なタイプと出力は、以下の通りです。
FE14 Gearbox Torque->Torque: Input torque、Output torque
FE45 Curve-Curve Contact: k Normal force、k Frictional force
FE46 Multi Point Bearing radial: Total force k
FE47 Multi Point Bearing axial: Total Force k
FE52 Gearbox Force->Force: Input force、Output force
FE55 Gearbox Torque->Force: Input torque、Output force
FE69 Piston-Liner Contact: Force contact node k
FE78 Rail-Wheel Interface: -Q neg. Vertical wheel force、
-Y neg. Lateral wheel force、-Tx k、-Ty k、-N k
FE197 Geom. Prim. Contact: Normal force k
FE204 Basic Gear Pair: Left contact frc x/y/z in mk_from、
Right contact frc x/y/z in mk_from
FE225 Gear Pair: fl_t slice k resul.、fl_x/y/z slice k resul.、
fl_n/t slice k tooth -1/0/+1、fl_x/y/z slice k tooth -1/0/+1
FE227 Chain Link Results: Total normal force、Friction Force
FE240 Belt Drive: k : scaled span forceIn、k : scaled span forceOu、
k : scaled hubload、k : scaled torque
FE242 Spline Coupling: Force tooth k flank l/r、Force slice i tooth j flnk l/r
-
ジョイント
リザルトツリーの “joint force” または “joint torque” からジョイントを展開し、”x、y、z” のいずれかをアニメーションフレームにドラッグすると、From ボディの BRF 基準での各方向の荷重/トルクが矢印で表示されます。ジョイントそのものをドラッグすると、合力が表示されます。
Simpack ポスト処理(プロット)
Q42. CSV ファイルの読み込み方法を教えて下さい。
A42. SIMPACK Post は、カンマ区切りの CSV ファイルに加え、任意の区切り文字による ASCII 形式データを読み込むことができます。
手順は以下の通りです。
1. “Open” アイコンをクリック、またはリザルトツリーの “Files” を右クリックして “Open” を選択します。ファイルブラウザが開きます。
2. ファイルタイプを “ASCII Result (*.csv)” または “ASCII Result (*.*)” に設定します。
3. 読み込みたいファイルを選択し、”開く” ボタンをクリックします。”Ascii Import” ダイアログが開きます。
4. 読み込み条件を設定します。設定項目は以下の通りです。 “treat consecutive Separators as one Separators”
チェックすると、連続した区切り文字は 1 文字として扱います。
”ignore leading Separators”
チェックすると、先頭の区切り文字を無視します。
”Separator”
区切り文字の種類を指定します。
Tabulator: タブ
Comma: カンマ
Semicolon: セミコロン
Blank: 空白
Other: その他 (右のボックスに区切り文字を入力)
”Start import in line”
データの読み込み開始行を数値で入力します。
”Text identification character”
文字列の引用符として、二重引用符 ( ” ) と単一引用符 ( ‘ ) のいずれかを選択します。
”File contains”
ファイルの先頭に以下の項目が含まれている場合は、チェックを入れます。単位は必ず角括弧で囲まれている必要があります(例: [m] )。
Columntitles: 列のタイトル
Units: 単位
”Arrangement of X values”
x 軸データの読み込み方法を選択します。
One X column per channel: 各データが固有の x 軸データを有します。
(x1, y1, x2, y2, …)
One X column per block: 1 つのデータブロックで共通の x 軸データを使用します。
(x, y1, y2, …)
5. “OK” ボタンをクリックすると、読み込んだデータがリザルトツリーに表示されます。
Q43. CSV ファイルの出力方法を教えて下さい。
A43. 2D もしくは 3D ダイアグラム上のカーブを、CSV 形式をはじめとする ASCII 形式データファイルとして出力できます。
手順は以下の通りです。
1. セッションツリーまたはグラフィック領域で、カーブ、ダイアグラム、ページ、ページセット、またはプロジェクトを選択します (複数同時選択可)。選択した要素に含まれるすべてのカーブが、出力対象となります。
2. メニューバーから “File” → “Export” → “ASCII Export” を選択して、”ASCII Export” ダイアログを開きます。
3. 出力条件を設定します。主な設定項目は以下の通りです (”Format” タブ)。
”Separator”
区切り文字の種類を指定します。
Tabulator: タブ
Comma: カンマ
Semicolon: セミコロン
Blank: 空白
Other: その他 (右のボックスに区切り文字を入力)
”Text identifier”
文字列の引用符として、二重引用符 ( ” )、単一引用符 ( ‘ )、引用符なしのいずれかを選択します。
”Numeric comma”
小数点の記号として、ピリオド ( . ) とカンマ ( , ) のいずれかを選択します。
”Number format”
データの表示形式を選択します。
Significant figures: 有効桁数指定による数値表示
Scientific: 小数点以下の桁数指定による指数表示
Decimal places: 小数点以下の桁数指定による数値表示
”Precision”
データの桁数を数値で入力します。
4. “Browse” ボタンをクリックしてファイルブラウザを開き、ファイル名と出力ディレクトリを指定します。
5. “保存” ボタンをクリックしてファイルブラウザを閉じます。
6. “OK” ボタンをクリックすると、ASCII ファイルが出力されます。
Q44. y軸を追加できますか?
A44. できます。
SIMPACK Post の 2D ダイアグラムには、任意の数の軸 (x または y) を追加できます。手順は以下の通りです。
1. セッションツリーまたはグラフィック領域で、y 軸を追加したいダイアグラムを右クリックして、”Add” → “Y-Axis” を選択します。y 軸が追加されます。
2. セッションツリーまたはグラフィック領域で、新たに追加した y 軸に割り当てたいカーブを右クリックして、”Properties” を選択します。
3. “Y-Axis” で割り当てる軸 (Primary、Y2、Y3、…) を選択します。
同様の手順で x 軸も追加できます。
Simpack 弾性体
Q45. IRM、FRM とは何ですか?
A45. ジョイント、拘束、フォース要素からの荷重入力による弾性体の変形を表現するための、インターフェースモードの算出手法です。
インターフェースモードは、固有モードの重ね合わせだけでは不十分な、局所的な変形を高精度に表現するのに適しています。弾性体の変形が、固有モードだけで表現可能であることが明確な場合を除き、常に IRM か FRM のいずれかを設定することを推奨します。
-
IRM (Inertia Relief Mode = 慣性リリーフモード)
-
IRM は、インターフェース節点への単位荷重入力による静的変形に基づくモードで、フリーフリー (非拘束) 状態の弾性体に対する静解析によって得られます。単位荷重により、等加速度の剛体運動が発生します。この等加速度運動による慣性力を、単位荷重とともに構造物に与えて、IRM を算出します。
IRM は、弾性体への荷重入力周波数が 0 Hz (静荷重) の場合に、理論的に正しい手法です。荷重が準静的とみなせる場合に推奨します。
-
FRM (Frequency Response Mode = 周波数応答モード)
-
FRM は、単位振幅の調和振動荷重入力によるモードで、フリーフリー (非拘束) 状態の弾性体に対する周波数応答解析によって得られます。FRM を算出するためには、調和振動の加振周波数を決める必要があります。
FRM auto: 推奨加振周波数 (弾性体 1 次固有周波数の半分) を自動で設定
FRM manual: 加振周波数をユーザーが指定FRM は、弾性体への荷重入力周波数が加振周波数と等しい場合に、理論的に正しい手法です。動的な荷重を考慮したい場合に推奨します。
Q46. 弾性体と剛体を簡単に切り替えたいのですが…
A46. 弾性体のボディプロパティダイアログでタイプを “Flexible (Modal)” から “Rigid” に変更すると、弾性体から剛体に切り替えることが可能です。
ただし、この方法では弾性体用のプリミティブタイプ “28: Flexible Body” が使えないため、有限要素モデルから取り込んだグラフィックが消えてしまいます。
これに代わるものとして、以下の方法を推奨します。
1. 弾性体のボディプロパティダイアログで、”Modes” タブを選択します。
2. Eigenmode と Interface modes を “None” とします。
これにより、弾性体用のグラフィック表示を残したままで、弾性体から剛体に切り替えることが可能です。
剛体から弾性体に戻す場合は、手順 2 のEigenmode と Interface modes を元に戻して下さい。
Q47.弾性体マーカーの弾性タイプごとの違いを教えて下さい。
A47. 弾性体上のマーカーには、マーカープロパティダイアログの “Flexible type” で弾性タイプを選択する必要があります。
弾性タイプは以下の6種類です。
-
Classic Connection
“Position” でマーカー位置を設定すると、”Search Tolerance” に応じて近傍の 1 ~ 4 つの節点が自動的に選択されます。マーカー位置を中心に “Search Tolerance” 以内に節点が存在する場合は、最も近い節点に結合されます。存在しない場合、近傍の 2 ~ 4 つの節点が選択され、マーカーの運動はこれらの節点の線形補間で表現されます。
-
User Defined Interpolation
“Position” でマーカー位置を設定し、その運動は “Flexible node ID 1 ~ 4” で指定した最大 4 つまでの節点の線形補間で表現されます。
-
RBE
Rigid Body Element (剛体要素) の略で、”Flexible node ID 1″ で設定した節点と “Position” で設定したマーカー位置を無質量剛体リンクで結合します。
-
Position Connect
“Flexible node ID 1” で設定した節点上にマーカーが作成され、この節点と同じ並進および回転運動を行います。マーカーが常に節点上にあるため、位置は設定できませんが、BRFに対する向きは設定できます。
-
Undeformed
弾性体ボディの剛体運動にのみ追従し、変形には追従しません。弾性体に荷重やトルクを正しく伝達できないため、ジョイント (6 自由度以外)、拘束、フォース要素の結合には使わないで下さい。
-
RBE Auto Connect
マーカーの動作原理は “RBE” タイプと同じです。”Position” でマーカー位置を設定すると、最も近い節点が結合先として自動的に選択されます。
Simpack トラブルシューティング
Q48. SIMPACK が頻繁にクラッシュします。
A48.SIMPACK Pre または Post がクラッシュする原因の約 9 割は、グラフィックカードに関連したものです。
具体的には、以下の 3 つが挙げられます。
・グラフィックカードが適切でない
・ドライババージョンが古い
・ドライバ設定が適切でない
クラッシュが少なく、快適なグラフィック環境のためには、以下の要件が必要です。
・NVIDIA Quadro K1000 (M) 以上のグラフィックカード
・最新の NVIDIA グラフィックドライバ (バージョン 310 以上)
・ドライバ設定として以下のいずれかを選択
”Workstation App – Dynamic Streaming”
”Dassault Systemes CATIA – compatible”
-
NVIDIA ドライババージョンの確認手順
-
1. NVIDIA コントロールパネルを開きます。
2. 画面左下の “システム情報” をクリックします。
3. “ディスプレイ” タブの “グラフィックスカード情報” 欄にバージョンが表示されます。
-
NVIDIA ドライバの設定手順
-
1. NVIDIA コントロールパネルを開きます。
2. “タスクの選択” で “3D 設定の管理” を選択します。
3. “グローバル設定” タブの “グローバルプリセット” で以下のいずれかを選択します。
“Workstation App – Dynamic Streaming”
“Dassault Systemes CATIA – compatible”